动手点关注 干货不迷路 ?
简介
本文主要通过探究在golang 中map的数据结构及源码实现来学习和了解map的特性,共包含map的模型探究、存取、扩容等内容。欢迎大家共同讨论。
Map 的底层内存模型
在 golang 的源码中表示 map 的底层 struct 是 hmap,其是 hashmap 的缩写
type hmap struct {
// map中存入元素的个数, golang中调用len(map)的时候直接返回该字段
count int
// 状态标记位,通过与定义的枚举值进行&操作可以判断当前是否处于这种状态
flags uint8
B uint8 // 2^B 表示bucket的数量, B 表示取hash后多少位来做bucket的分组
noverflow uint16 // overflow bucket 的数量的近似数
hash0 uint32 // hash seed (hash 种子) 一般是一个素数
buckets unsafe.Pointer // 共有2^B个 bucket ,但是如果没有元素存入,这个字段可能为nil
oldbuckets unsafe.Pointer // 在扩容期间,将旧的bucket数组放在这里, 新buckets会是这个的两倍大
nevacuate uintptr // 表示已经完成扩容迁移的bucket的指针, 地址小于当前指针的bucket已经迁移完成
extra *mapextra // optional fields
}
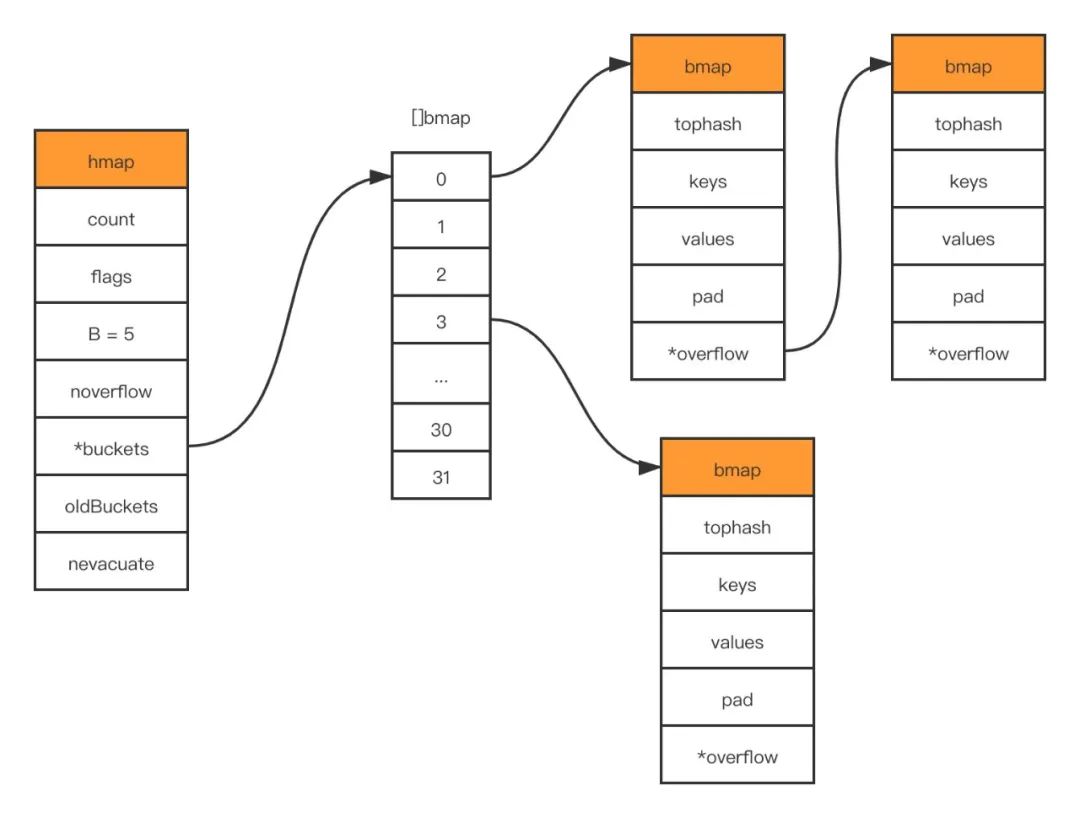
B 是 buckets 数组的长度的对数, 即 bucket 数组的长度是 2^B。bucket 的本质上是一个指针,指向了一片内存空间,其指向的 struct 如下所示:
// A bucket for a Go map.
type bmap struct {
tophash [bucketCnt]uint8
}
但这只是表面(src/runtime/hashmap.go)的结构,编译期间会给它加料,动态地创建一个新的结构:
type bmap struct {
topbits [8]uint8
keys [8]keytype
values [8]valuetype
pad uintptr // 内存对齐使用,可能不需要
overflow uintptr // 当bucket 的8个key 存满了之后
}
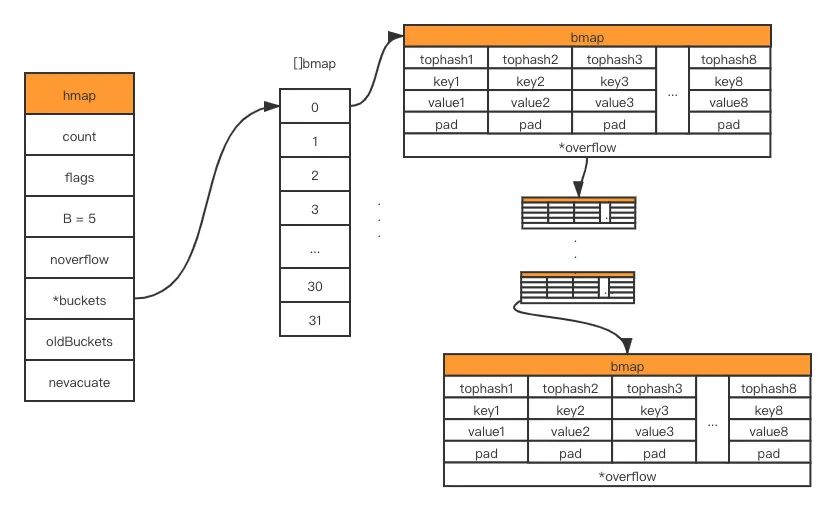
bmap 就是我们常说的“桶”的底层数据结构, 一个桶中可以存放最多 8 个 key/value, map 使用 hash 函数 得到 hash 值决定分配到哪个桶, 然后又会根据 hash 值的高 8 位来寻找放在桶的哪个位置
具体的 map 的组成结构如下图所示:
Map 的存与取
在 map 中存与取本质上都是在进行一个工作, 那就是:
-
查询当前 k/v 应该存储的位置。 -
赋值/取值, 所以我们理解了 map 中 key 的定位我们就理解了存取。
底层代码
func mapaccess2(t *maptype, h *hmap, key unsafe.Pointer) (unsafe.Pointer, bool) {
// map 为空,或者元素数为 0,直接返回未找到
if h == nil || h.count == 0 {
return unsafe.Pointer(&zeroVal[0]), false
}
// 不支持并发读写
if h.flags&hashWriting != 0 {
throw("concurrent map read and map write")
}
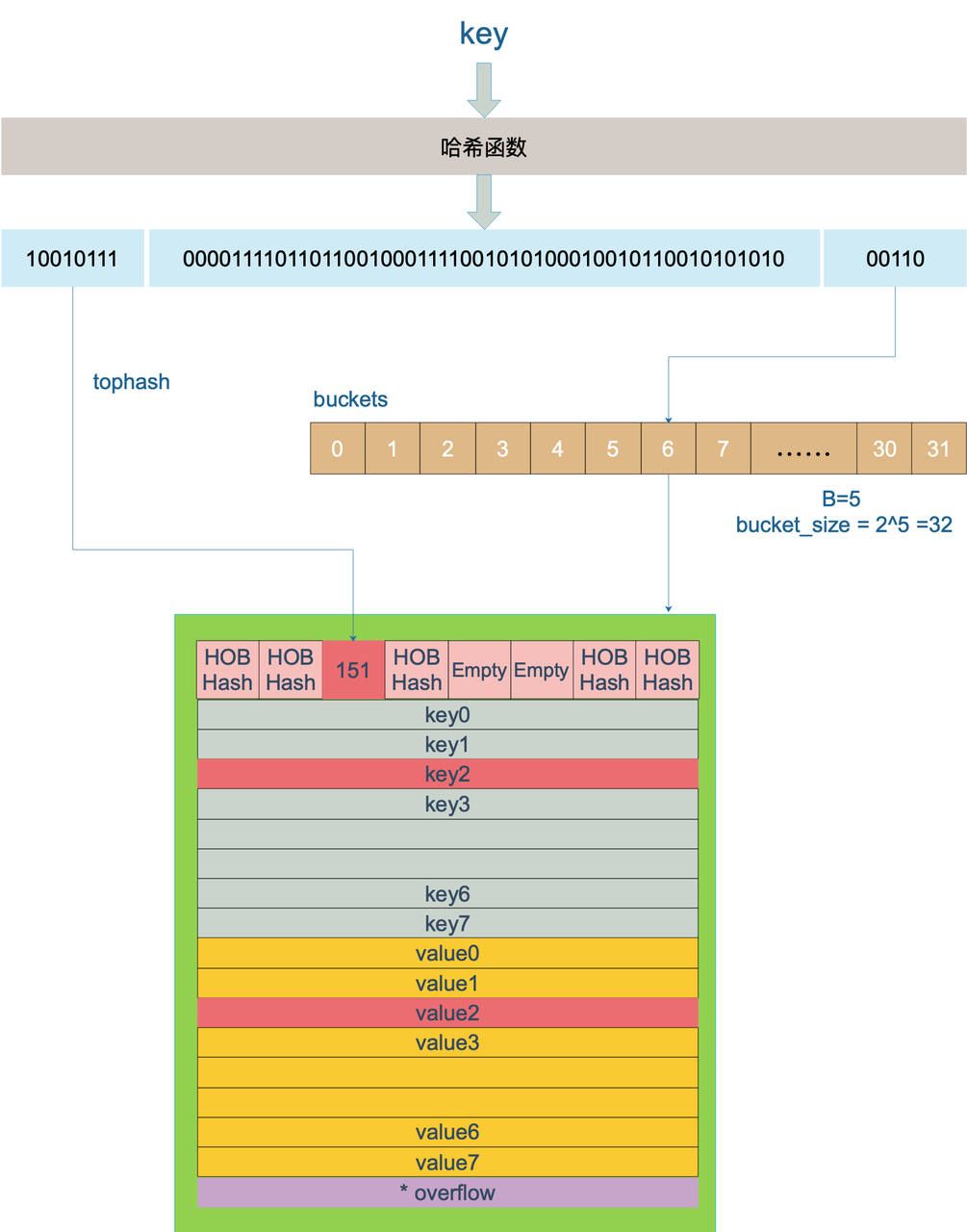
// 根据hash 函数算出hash值,注意key的类型不同可能使用的hash函数也不同
hash := t.hasher(key, uintptr(h.hash0))
// 如果 B = 5,那么结果用二进制表示就是 11111 , 返回的是B位全1的值
m := bucketMask(h.B)
// 根据hash的后B位,定位在bucket数组中的位置
b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) + (hash&m)*uintptr(t.bucketsize)))
// 当 h.oldbuckets 非空时,说明 map 发生了扩容
// 这时候,新的 buckets 里可能还没有老的内容
// 所以一定要在老的里面找,否则有可能发生“消失”的诡异现象
if c := h.oldbuckets; c != nil {
if !h.sameSizeGrow() {
// 说明之前只有一半的 bucket,需要除 2
m >>= 1
}
oldb := (*bmap)(unsafe.Pointer(uintptr(c) + (hash&m)*uintptr(t.bucketsize)))
if !evacuated(oldb) {
b = oldb
}
}
// tophash 取其高 8bit 的值
top := tophash(hash)
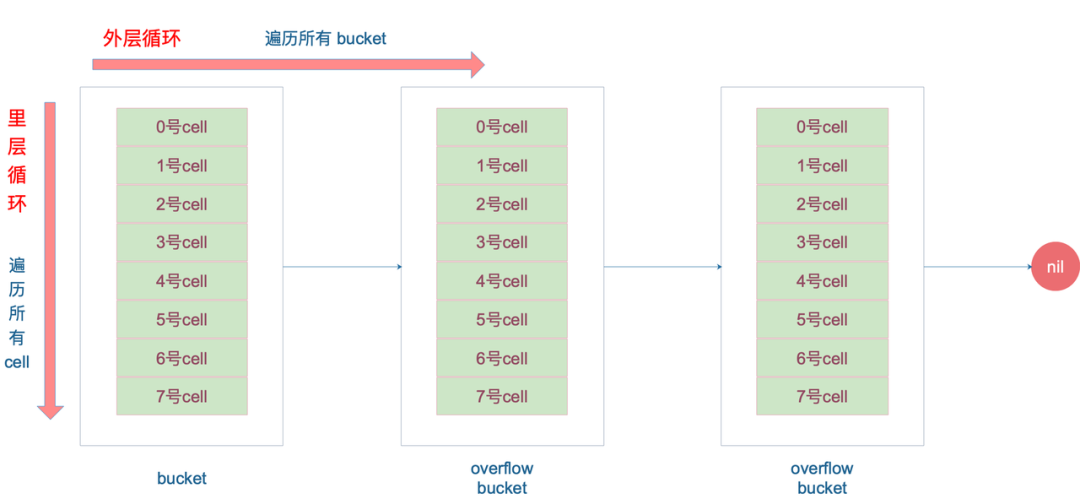
// 一个 bucket 在存储满 8 个元素后,就再也放不下了,这时候会创建新的 bucket,挂在原来的 bucket 的 overflow 指针成员上
// 遍历当前bucket的所有链式bucket
for ; b != nil; b = b.overflow(t) {
// 在bucket的8个位置上查询
for i := uintptr(0); i < bucketCnt; i++ {
// 如果找到了相等的 tophash,那说明就是这个 bucket 了
if b.tophash[i] != top {
continue
}
// 根据内存结构定位key的位置
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey {
k = *((*unsafe.Pointer)(k))
}
// 校验找到的key是否匹配
if t.key.equal(key, k) {
// 定位v的位置
v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
if t.indirectvalue {
v = *((*unsafe.Pointer)(v))
}
return v, true
}
}
}
// 所有 bucket 都没有找到,返回零值和 false
return unsafe.Pointer(&zeroVal[0]), false
}
寻址过程
Map 的扩容
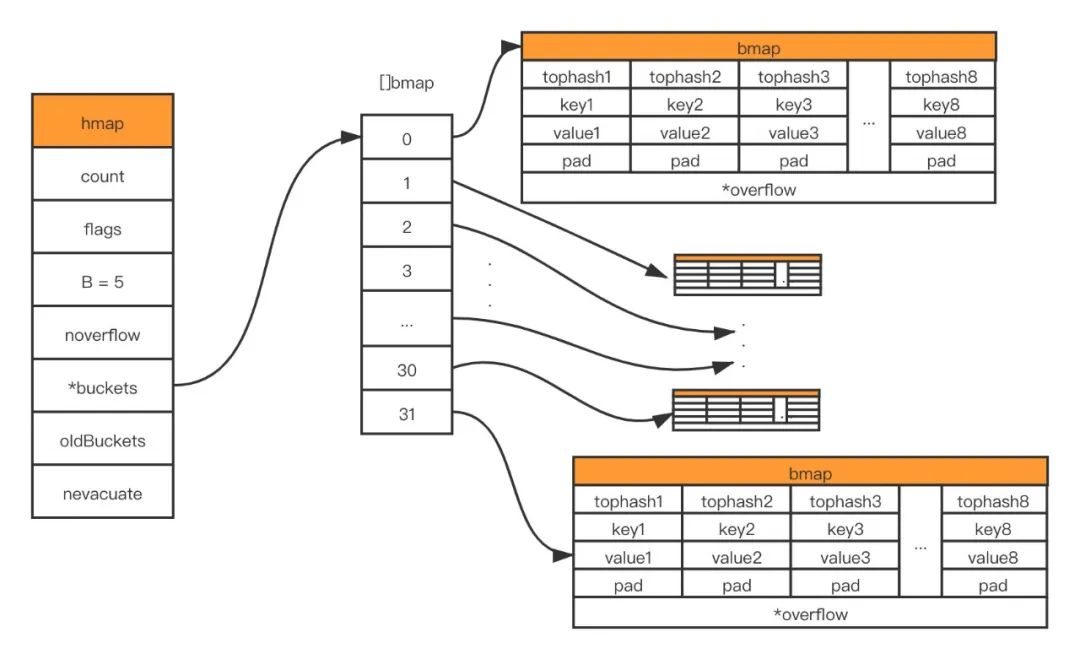
在 golang 中 map 和 slice 一样都是在初始化时首先申请较小的内存空间,在 map 的不断存入的过程中,动态的进行扩容。扩容共有两种,增量扩容与等量扩容(重新排列并分配内存)。下面我们来了解一下扩容的触发方式:
-
负载因子超过阈值,源码里定义的阈值是 6.5。(触发增量扩容) -
overflow 的 bucket 数量过多:当 B 小于 15,也就是 bucket 总数 2^B 小于 2^15 时,如果 overflow 的 bucket 数量超过 2^B;当 B >= 15,也就是 bucket 总数 2^B 大于等于 2^15,如果 overflow 的 bucket 数量超过 2^15。(触发等量扩容)
第一种情况
第二种情况
Map 的有序性
objMap := make(map[string]int)
for i := 0; i < 5; i++ {
objMap[strconv.Itoa(i)] = i
}
for i := 0 ; i < 5; i ++ {
var valStr1, valStr2 string
for k, v := range objMap {
fmt.Println(k)
fmt.Println(v)
valStr1 += k
}
for k, v := range objMap {
fmt.Println(k)
fmt.Println(v)
valStr2 += k
}
fmt.Println(valStr1 == valStr2)
if valStr1 != valStr2 {
fmt.Println("not equal")
}
}
fmt.Println("end")

-
典型使用场景:map 的典型使用场景是不需要从多个 goroutine 中进行安全访问。 -
非典型场景(需要原子操作):map 可能是一些更大的数据结构或已经同步的计算的一部分。
, // 不支持并发读写
if h.flags&hashWriting != 0 {
throw("concurrent map read and map write")
}

文章评论